 平台热线
平台热线



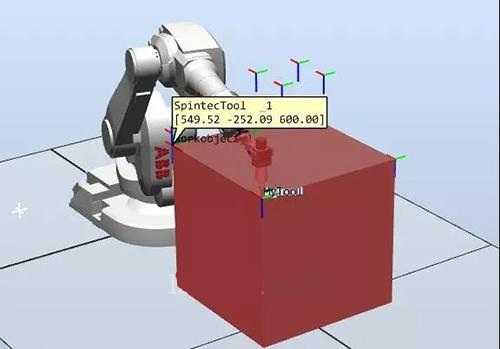
1)机器人做好轨迹后,可以通过碰撞检测来检查机器人工具是否和工件碰撞,如下图,机器人工具在该位置与工件相撞
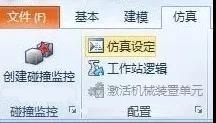
2)仿真-创建碰撞监控
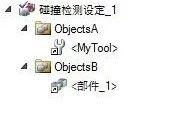
3)把要检测的两个对象拖入
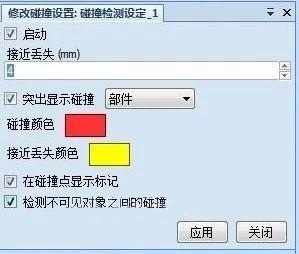
4)右击,设置
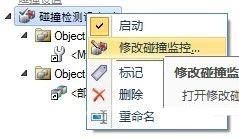
5)修改碰撞提示的颜色等。
6)有时候工具等也不能太接近工件,接近丢失即设置工具和工件在该范围内,报警
本文摘取网络(侵 删)
联系热线:156 0178 5639 联系人:李经理 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六 8:00-22:00 ABB机械手配件经销商
