平台热线
平台热线



描述
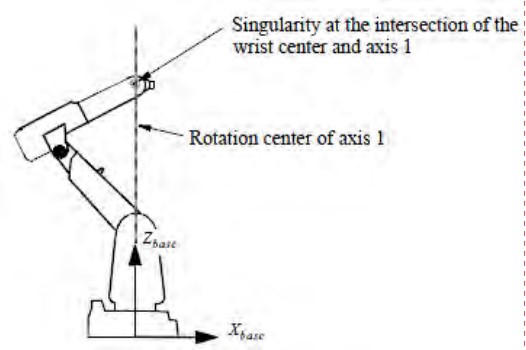
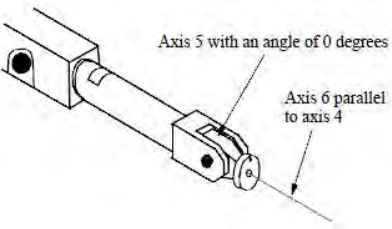
臂奇异点;
腕奇异点。
图55)。
如何通过奇异点执行程序
为避免超过***大关节速率,可降低直线路径速率。在接头交角处插补腕轴时,可用模式(SingArea\Wrist)使接头的高速率降低,同时仍维持机械臂工具的直线路经。但,与完全直线插补相比,这种方式可能会导致方位错误。注意,当机械臂经过带直线或圆弧插补的某一奇异点附近时,机械臂配置会发生显著变化。为避免重新配置,应利用导致必须重新配置的方位在奇异点另一侧设置***个位置。同时,还应注意,只移动外部接头时,机械臂不得停留在其奇异点,不然会导致机械
臂接头发生不必要的移动。
了解更多请点击:ABB机器人服务商